Optimizing Control Dynamics for Amateur Drone Racing: A Study in Advanced Quadrotor Maneuverability

Project information
- Category: Simulation Project
- Location: Champaign, IL
- Project date: Nov 2023
- Project URL: View Report
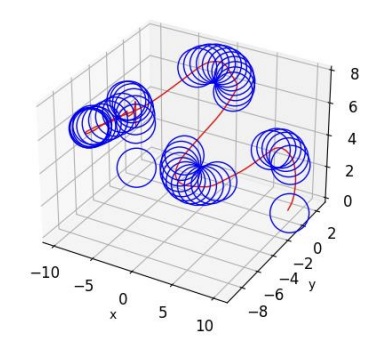
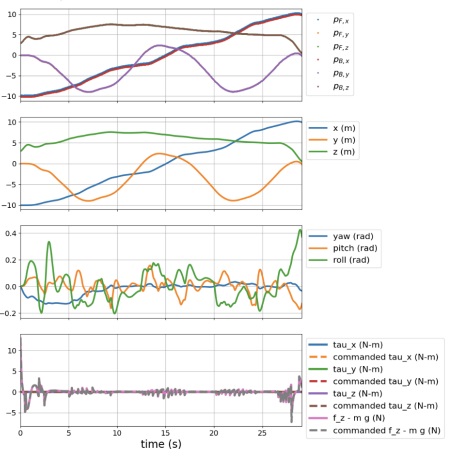
The design and analysis of a control system for a drone, intended for use in amateur drone racing. Emphasizing linearization, controller and observer design, along with controllability and observability, the report details the development of a stable, efficient control mechanism. The system's performance is evaluated through simulations, demonstrating the drone's ability to navigate through a pre-defined course with precision and speed. The project's success is anchored in its thorough theoretical foundation, rigorous mathematical modeling, and effective implementation of control strategies.
- Implemented a stable controller and observer system, validated through rigorous simulations using Python and PyBullet, demonstrating high-speed, agile flight capabilities.
- Successfully achieved project goals, with the drone completing a challenging race course within the stipulated time frame and without any collisions.
- Identified potential improvements for future work, including increasing payload capacity and adapting the system for different drone models.