Multidrone Synchronization with Swarm

Project information
- Category: Research Project
- Location: Champaign, IL
- Project date: Dec 2024
- Project URL: View Report
- Project Video: View Video
The design and implementation of a synchronization system for a swarm of drones, using time delay-based commands and motion capture integration. Emphasizing observer design, real-time communication, and scalability, the project demonstrated precise, drift-free drone movements in synchronized trajectories. The system's performance was evaluated through live flight tests, showcasing the scalability and robustness of the control mechanism. The project's success lies in its innovative use of motion capture data, detailed technical implementation, and effective demonstration of synchronized drone operations.
- Developed and implemented custom flight code integrating the Crazyflie swarm library and Qualisys motion capture system for real-time position updates via data packets.
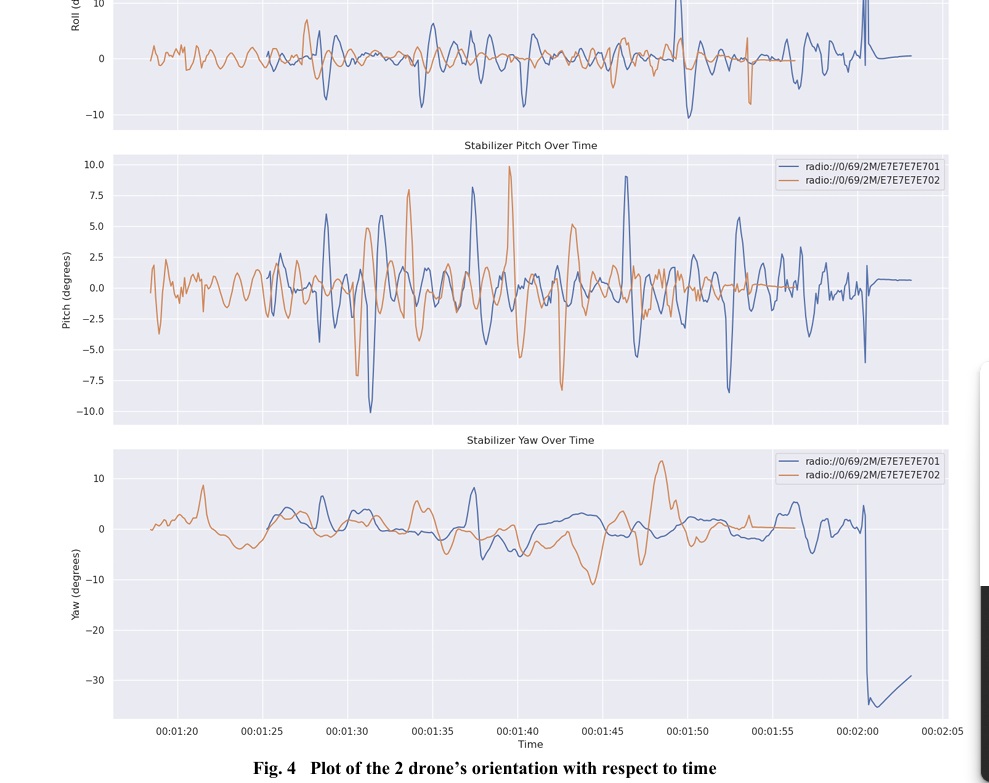
- Designed and validated a custom observer to achieve full state observability (𝑥, 𝑦, 𝑧), reducing drift and ensuring precise drone synchronization.
- Created and tested flight plans for multiple drones, demonstrating drift-free trajectories and robust communication under bandwidth constraints.
- Directed and edited the final demonstration video, showcasing synchronized drone movements and scalability for larger swarms.
- Identified potential future improvements, including enhancing communication bandwidth and extending the system to control larger drone swarms.