Advanced Control Strategies for Single Gimbal CMG Systems: Design and Modelling
Project information
- Category: Simulation Project
- Location: Champaign, IL
- Project date: Sep 2023
- Project URL: View Report
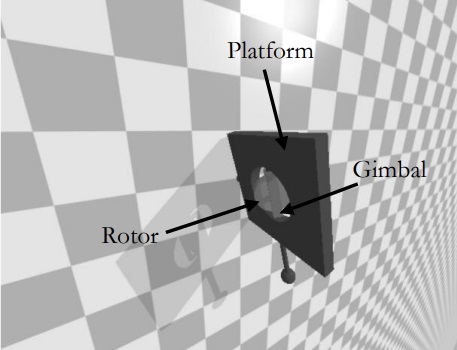
A comprehensive study on the design and implementation of a closed loop control system for a Single-Gimbal Control Moment Gyroscope (CMG) system. The research involves a multi-faceted approach that combines theoretical modelling, symbolic mathematics, and practical implementation to achieve precise control of the CMG system's dynamics. The objective is to stabilize the system and control its behaviour effectively.
- Employed advanced numerical analysis and simulation methodologies to assess CMG performance.
- Utilized Python for numerical analysis, creating a state-space model to simplify complex equations, enabling the application of advanced control strategies and stability analysis.
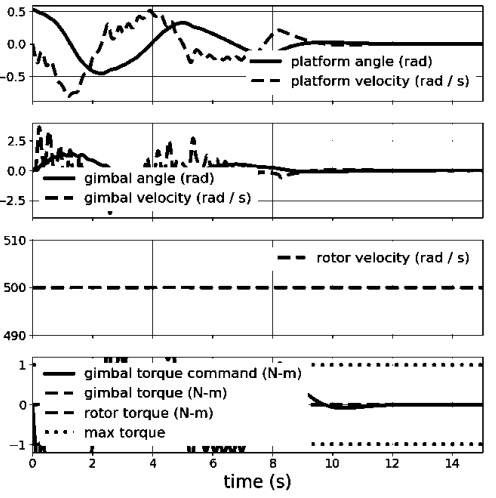
- Conducted extensive simulations to test system behavior under various conditions, including different initial angles, pole values, and system constants, demonstrating the system's performance and limitations.
- Analyzed the viability of the CMG model for real-world applications, identifying challenges and potential for optimization in control strategies for spacecraft control systems.